


 Customise Your Training
Customise Your Training

TechSource Systems is MathWorks Authorised Reseller and Training Partner
Gain Experience in creating an embedded Linux system targeting Xilinx SoCs
using the PetaLinux tools.

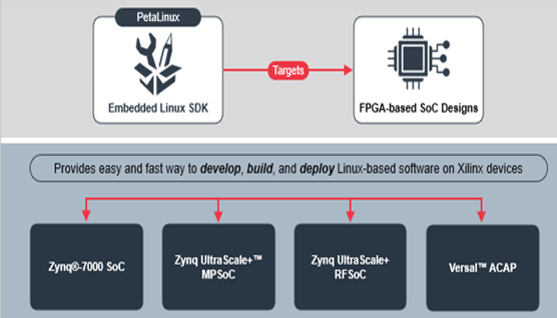
This two-day course provides embedded systems developers experience with creating an embedded Linux system targeting Xilinx SoCs using the PetaLinux tools.
The course provides experience with:
The primary focus is on embedded Linux development in conjunction with the Xilinx tool flow.
What’s New for 2021.1

Embedded software developers interested in customizing a kernel using PetaLinux on the Arm processors available in Xilinx SoCs.


After completing this comprehensive training, you will have the necessary skills to:
TechSource Systems is MathWorks Authorised Reseller and Training Partner
Objective: Introduces embedded Linux, including a brief architectural overview, as well as some of the reasons for its rising popularity as an embedded OS. Also introduces the concept of toolchains and cross-compilation.

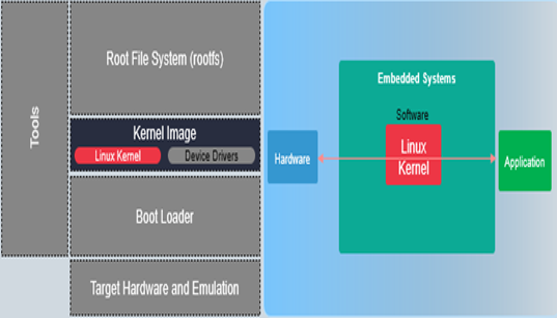
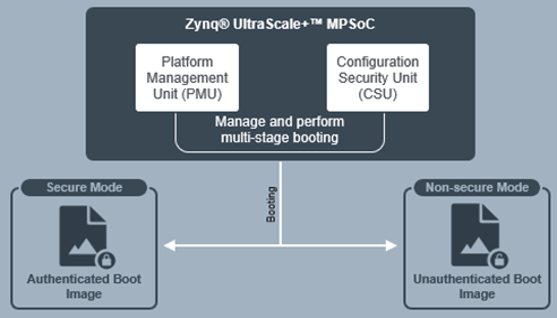
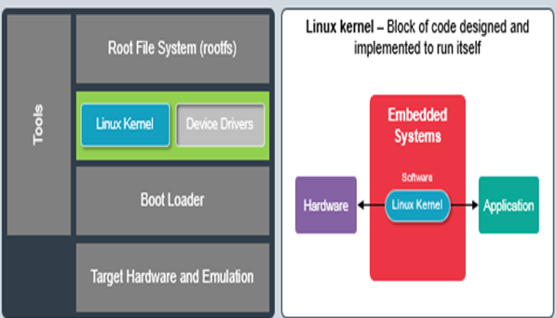
Objective: Describes the various components required for embedded Linux platforms (including the kernel image, root file system, and boot loaders) and how the components affect the booting of Linux on these platforms.
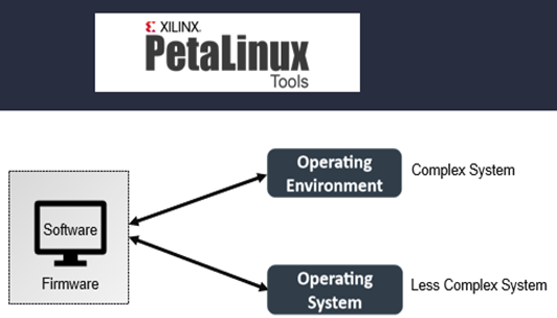
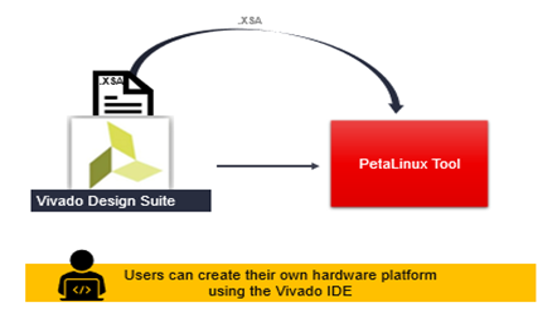
Objective: Covers the functionality, inputs, and outputs of the PetaLinux tools as well as the project directory structure generated by the PetaLinux tools. Basic PetaLinux commands are also introduced.

Objective: Provides a brief description of the PetaLinux tool design flow and describes in detail various PetaLinux commands (including petalinux-create, petalinux-config, petalinux-build, petalinux-package, and petalinux-boot) and their example use cases.
Objective: Introduces core concepts for developing, customizing, and running software applications in an embedded Linux environment.

Objective: Analyzes different configuration options provided by the PetaLinux tool for firmware version, rootfs type, boot image storage, and primary flash partition. Also describes external file system boot configuration.
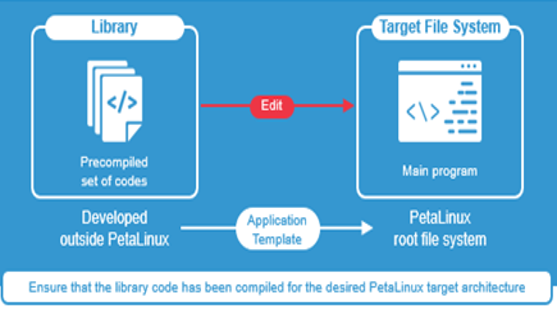
Objective: Provides a brief description on customizing the rootfs for embedded Linux components such as libraries, applications, modules, layers, recipes, and packages.
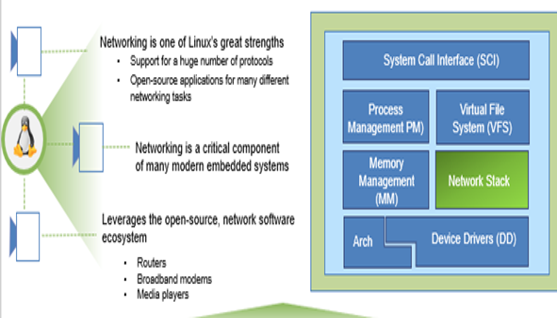
Objective: Discusses how the TCP/IP networking stack can be used to improve productivity during embedded product development by supporting network data communication, network control/status management, and firmware and hardware upgrades.
Objective: Describes how to package and then boot a PetaLinux image via QEMU, SD card, JTAG, and TFTP.
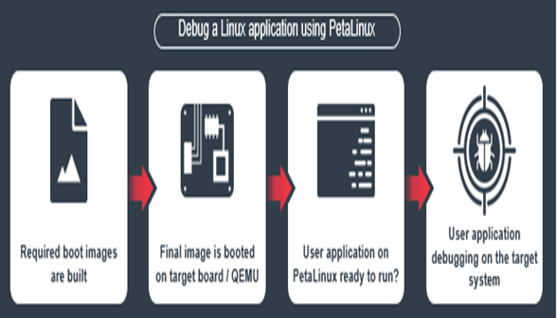
Objective: Describes how to debug software applications running on an Arm processor using the system debugger (TCF agent) or GNU debugger (GDB).
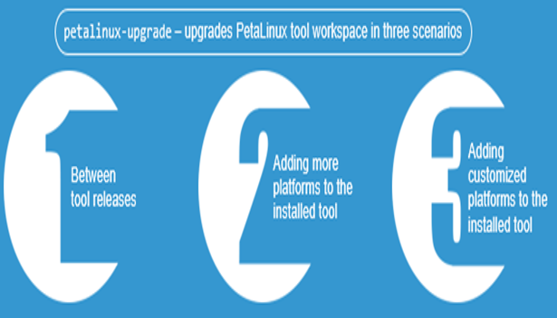
Objective: Describes the petalinux-upgrade command and how to upgrade PetaLinux project software components without changing the host tool components.
Objective: Describes the complete board bring-up process, which includes the hardware design as well as Linux image creation for the hardware.
Objective: Provides a brief overview on Linux device drivers and their requirements. Also describes what a device tree is and how it is generated.
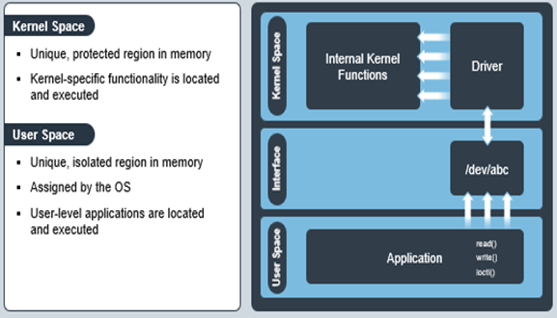
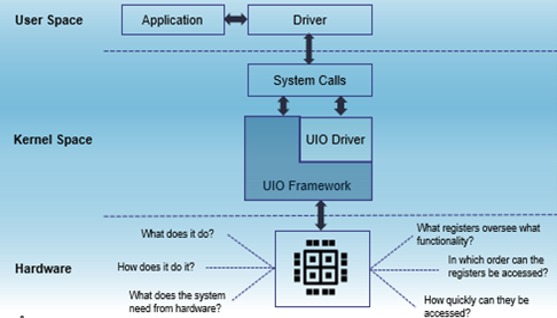
Objective: Introduces two lightweight approaches for accessing the physical memory of devices from user space: direct access through the dev/mem virtual device and the user space I/O framework. Also covers the role and usage loadable kernel modules.
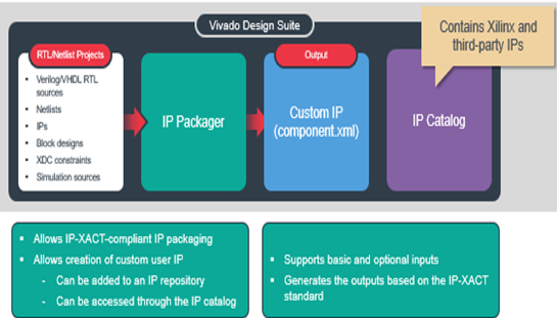
Objective: Describes the Create and Package IP Wizard and how it can be used to create a variety of architectural options for interfacing a system with custom processing hardware.
Objective: Discusses device driver options to match custom hardware devices and how to use the provided interfaces to read and write to the devices.
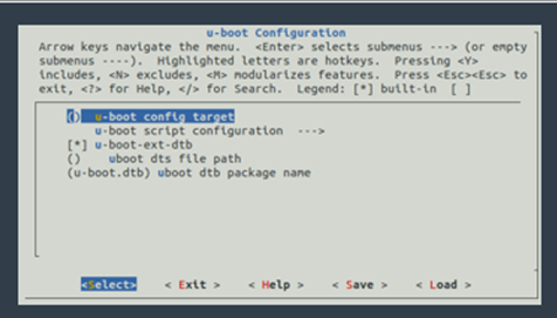
Objective: Reviews how modify advanced configuration settings using the PetaLinux tool. These configurations include including selecting
the Linux components for the build, enabling automatic configuration for a selected component, customizing how the Linux system interacts with the underlying hardware platform.