TechSource Systems is MathWorks Authorised Reseller and Training Partner
Learn how to design, analyze, and optimize closed-loop control systems using MATLAB and Simulink
Complimentary Services: Post training email support & 1-hr consultation session within 1 month after the course completion!

This two-day course provides a general understanding of how to accelerate the design process for closed-loop control systems using Simulink®. Topics include:

Engineer, researchers, scientists, and managers who are involved in control engineering design and problem solving. It is also strongly recommended for those who would like to establish and strengthen their foundation in Control Engineering.

MATLAB Fundamentals and Simulink for System and Algorithm Modeling or equivalent experience using MATLAB and Simulink. Also, an understanding of terminology and concepts related to common control systems.

Upon the completion of the course, the participants will gain a comprehensive understanding on the following:
TechSource Systems is MathWorks Authorised Reseller and Training Partner
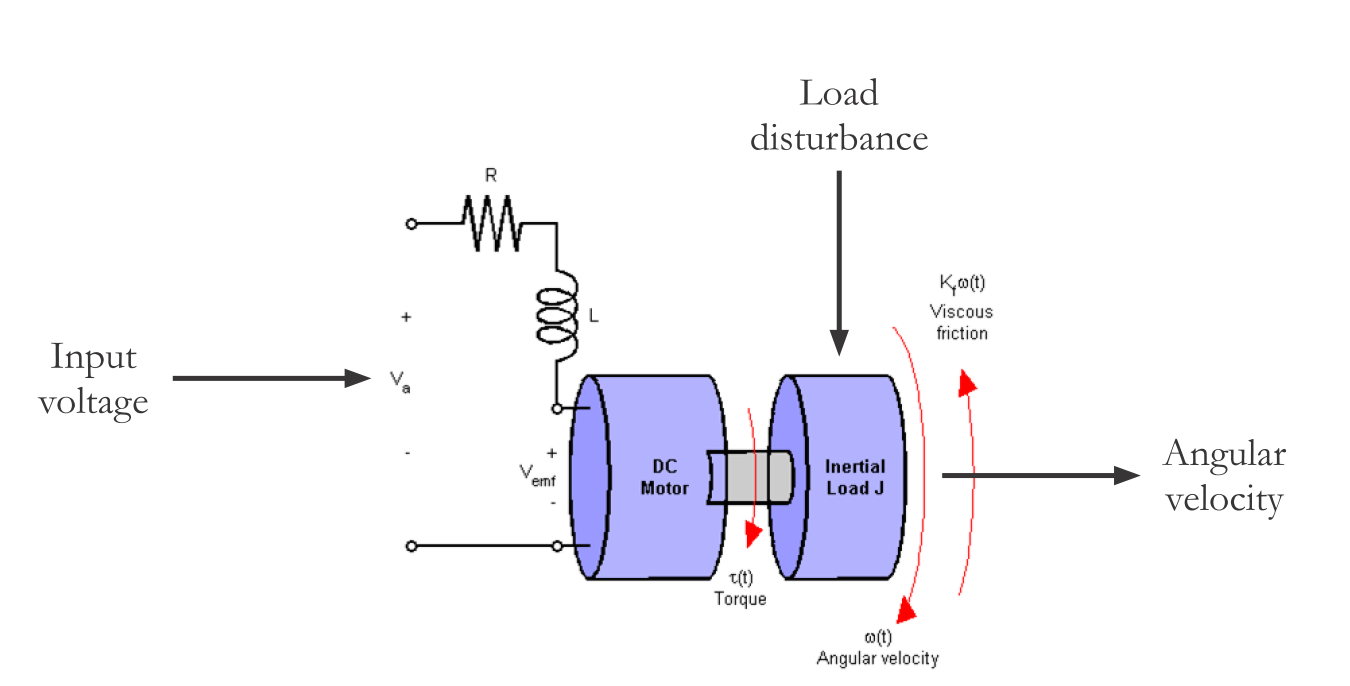
Objective: Provide an overview of the control system design process and introduce how MATLAB and Simulink fit into that process. The details of each step in the design process are covered in later chapters.
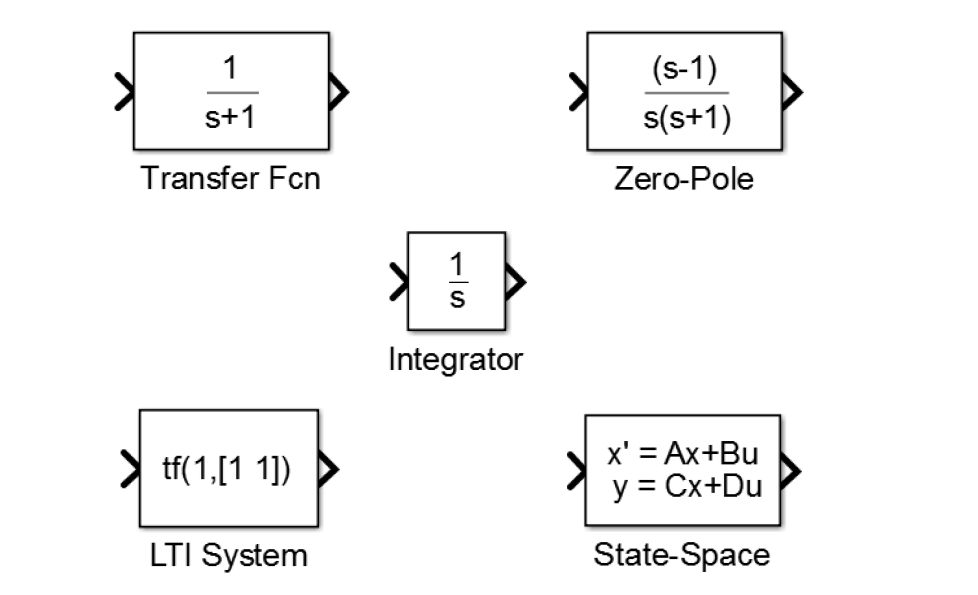
Objective: Discuss the various formats used for representing system models. Also highlights the pros and cons of each format.
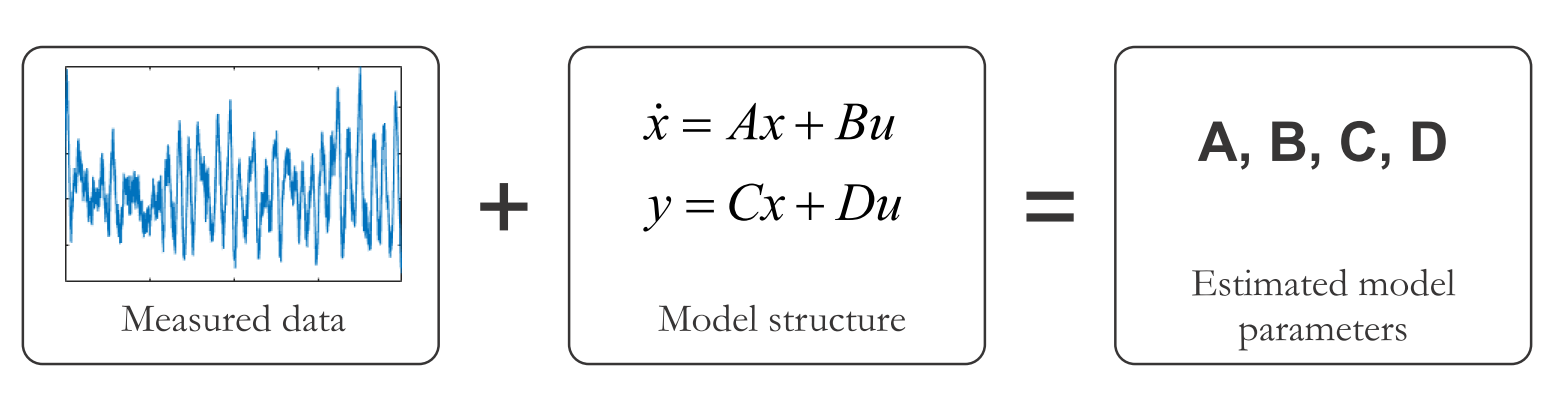
Objective: Illustrate how to estimate system models based on measured data.
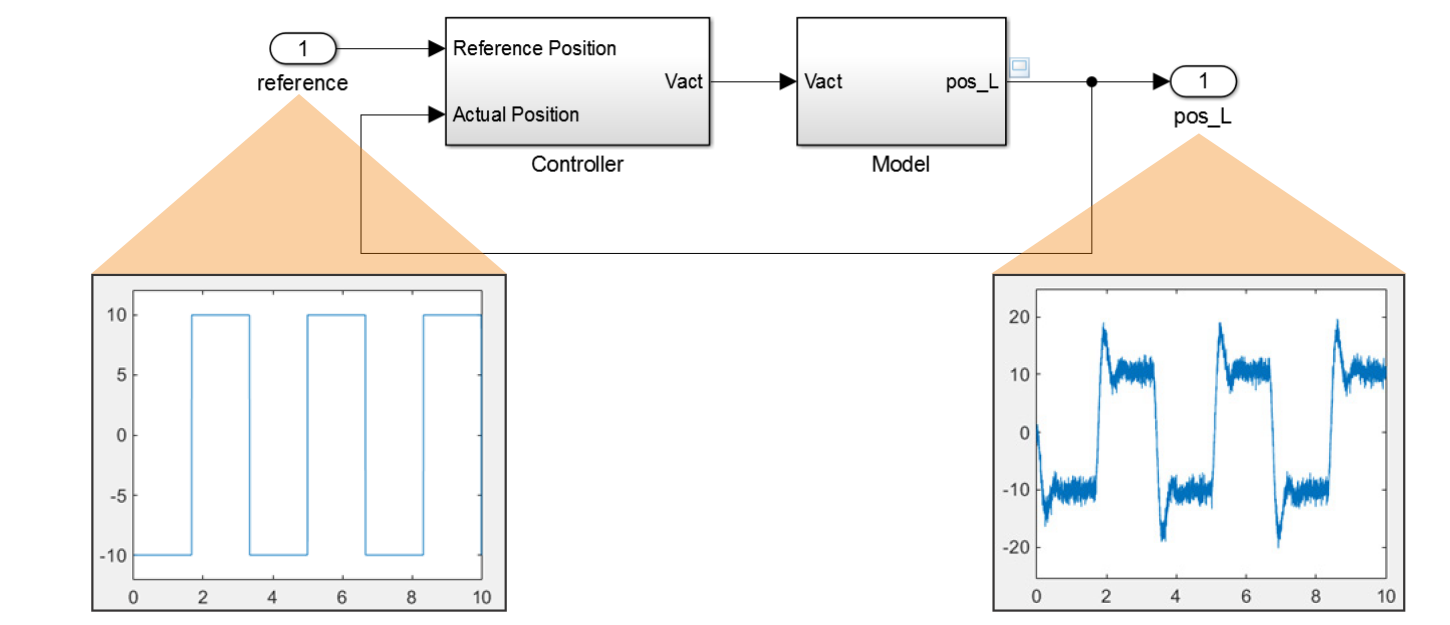
Objective: Use measured data to estimate the values of a Simulink model’s parameters.
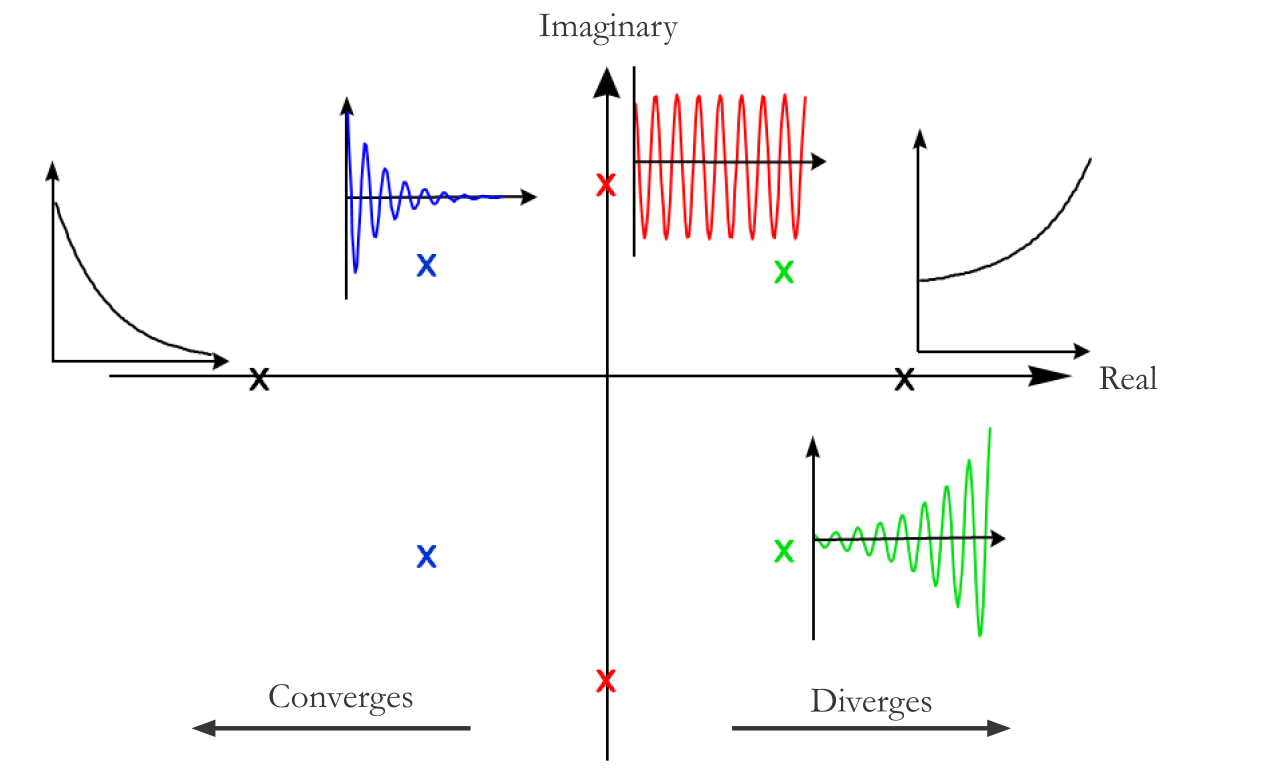
Objective: Outline the different analysis tools and functions available for understanding system behavior – such as system resonances, transient response, etc.
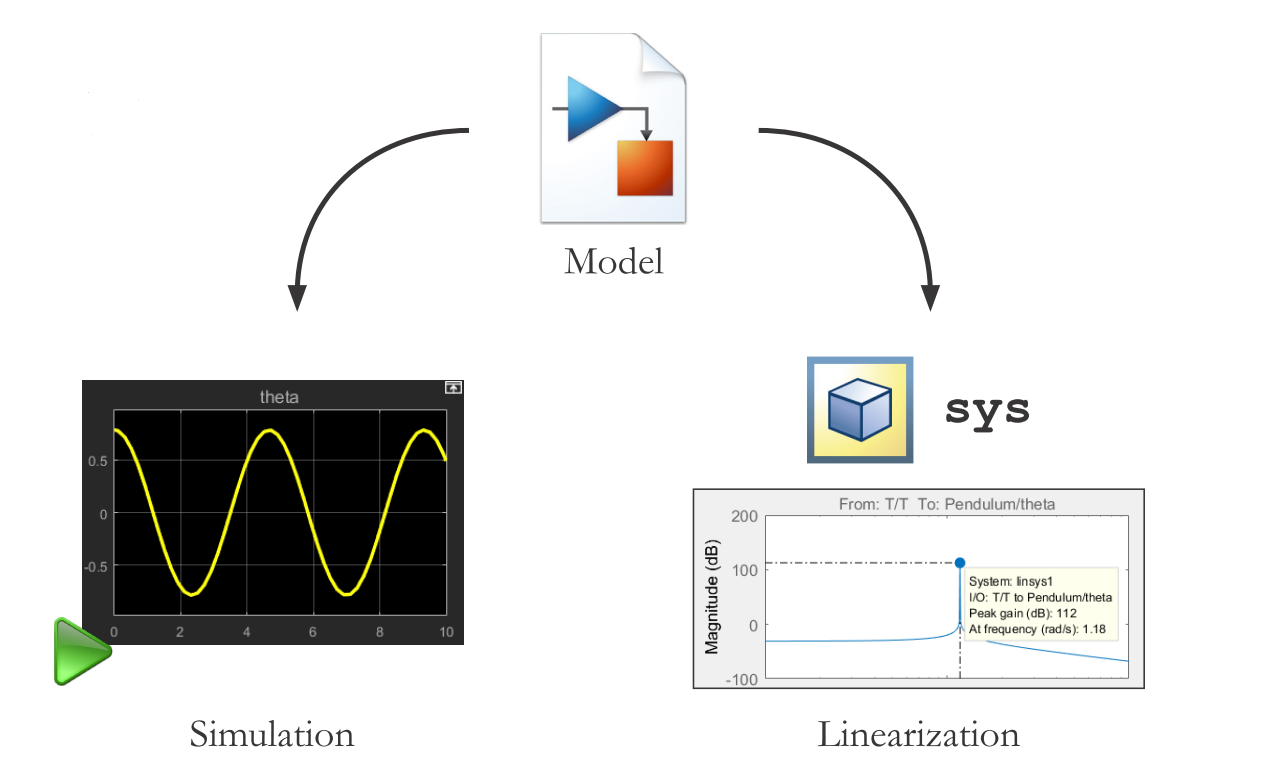
Objective: Discuss techniques for linearizing a Simulink model and validating the linearization results.
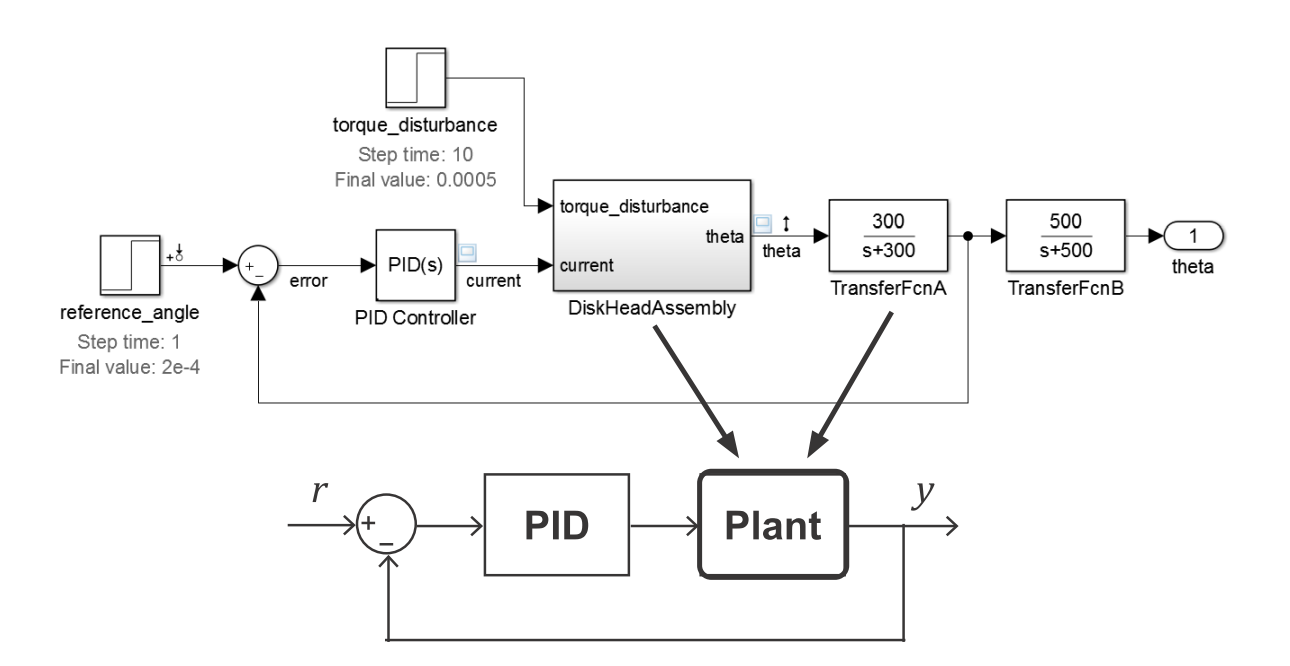
Objective: Use Simulink to model and tune PID controllers.
Objective: Use classical control design techniques to develop system controllers. Common control techniques are covered, such as PID and lead/lag controllers.
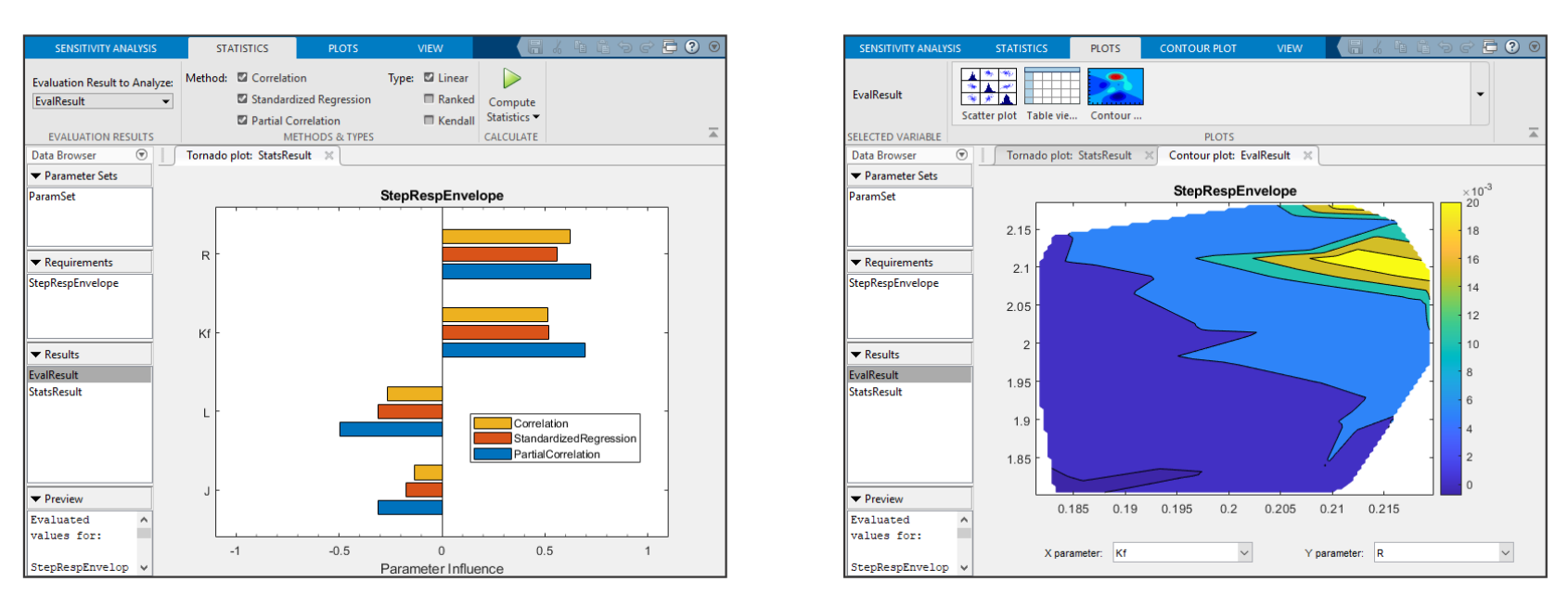
Objective: Use optimization techniques to tune model parameters based on design requirements and parameter uncertainty.
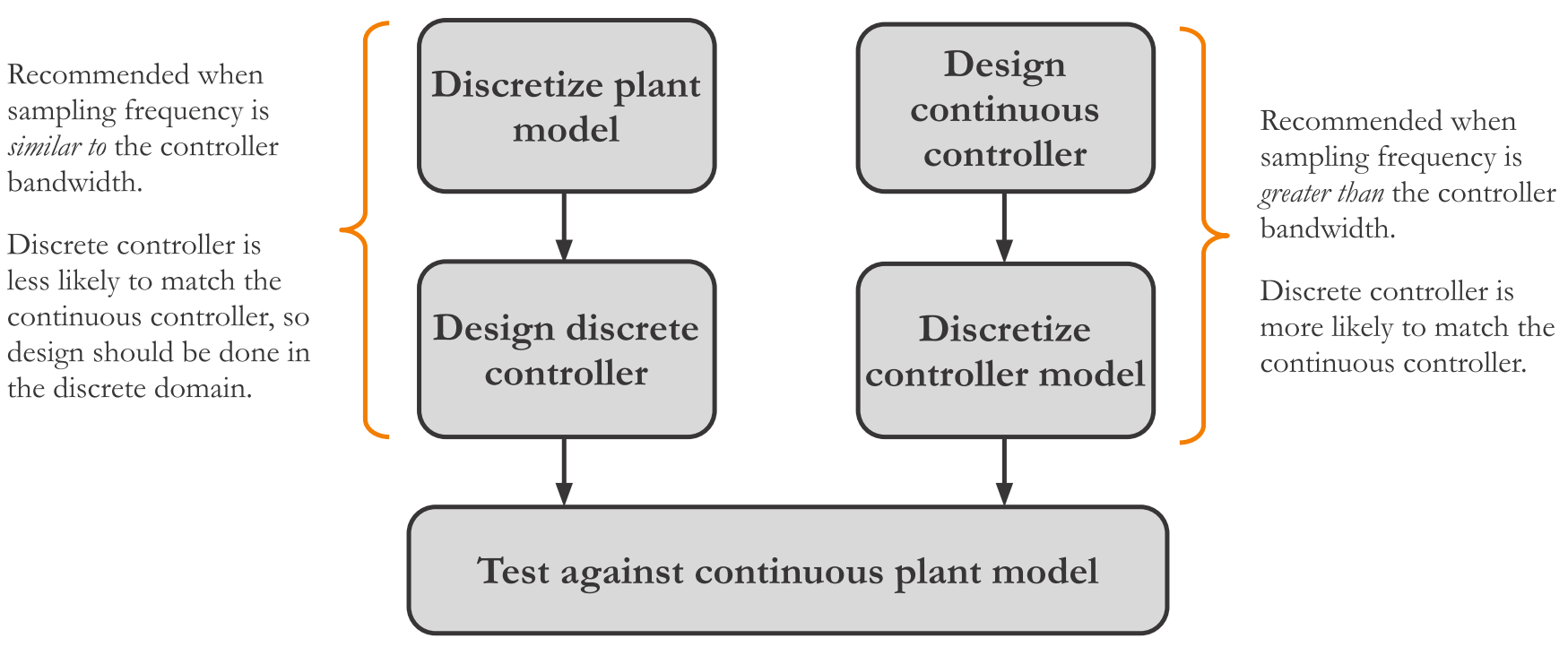
Objective: Discuss steps that might be needed to effectively implement a controller on a real system.